Soft Actuators for Shoulder Rehabilitation
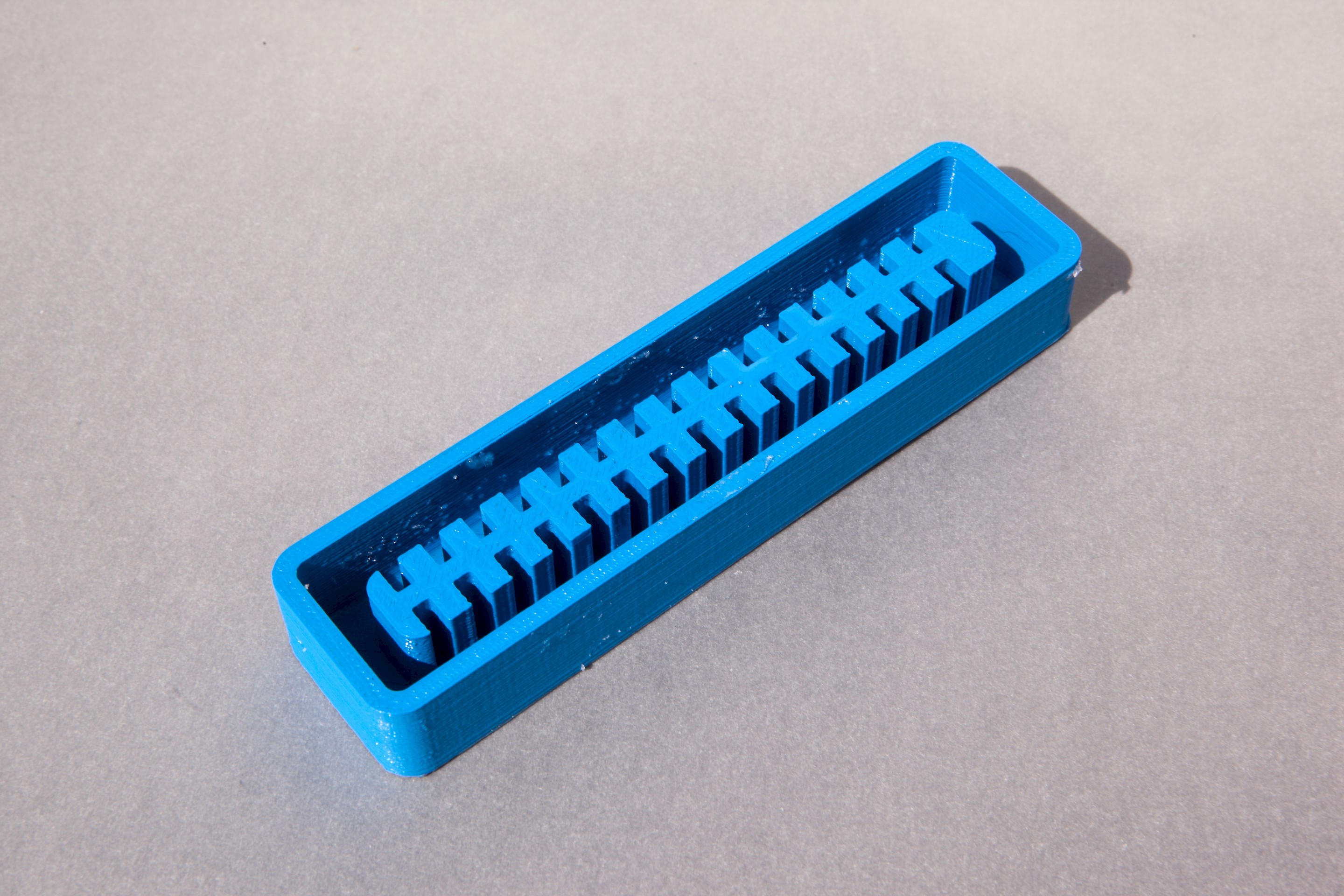
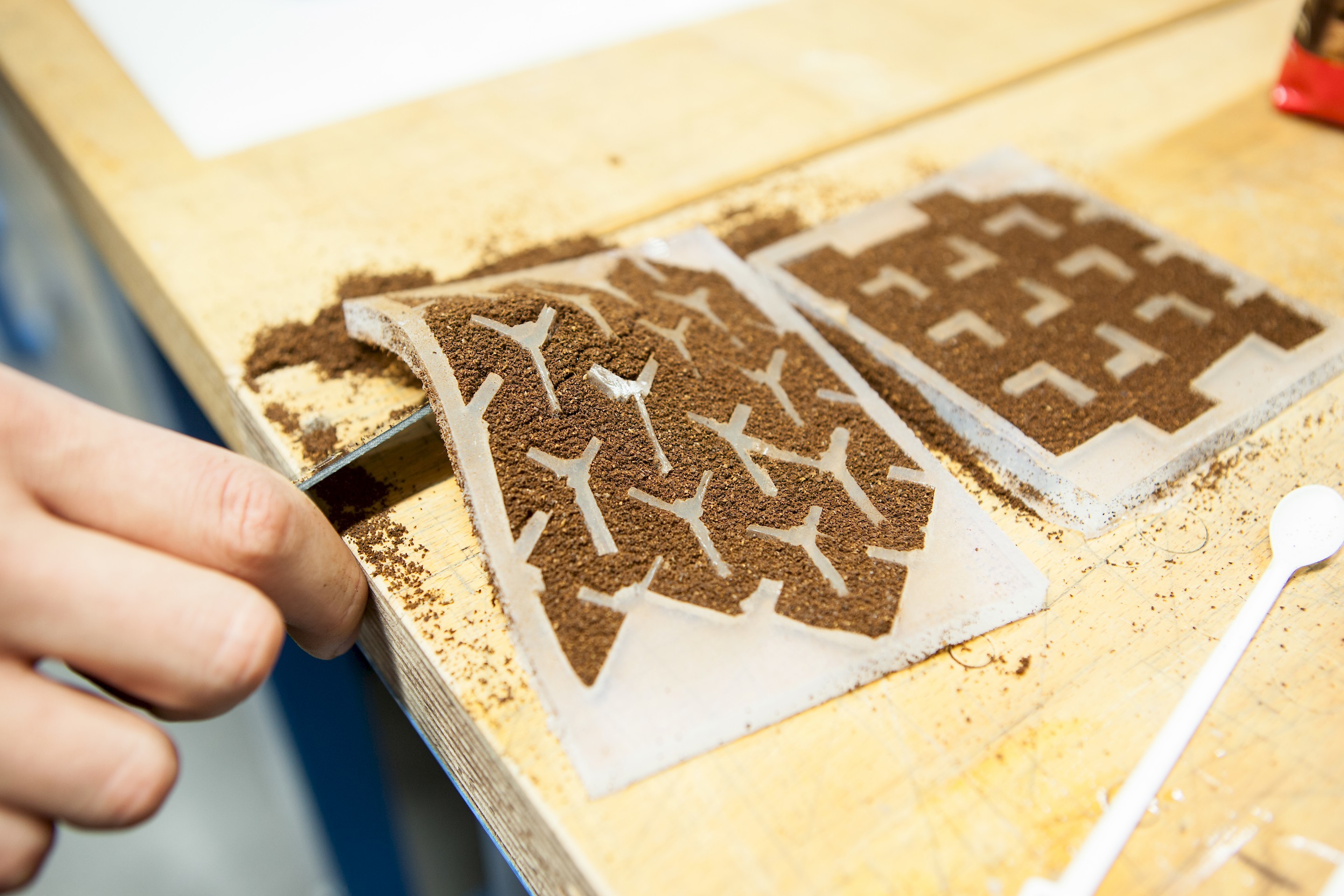
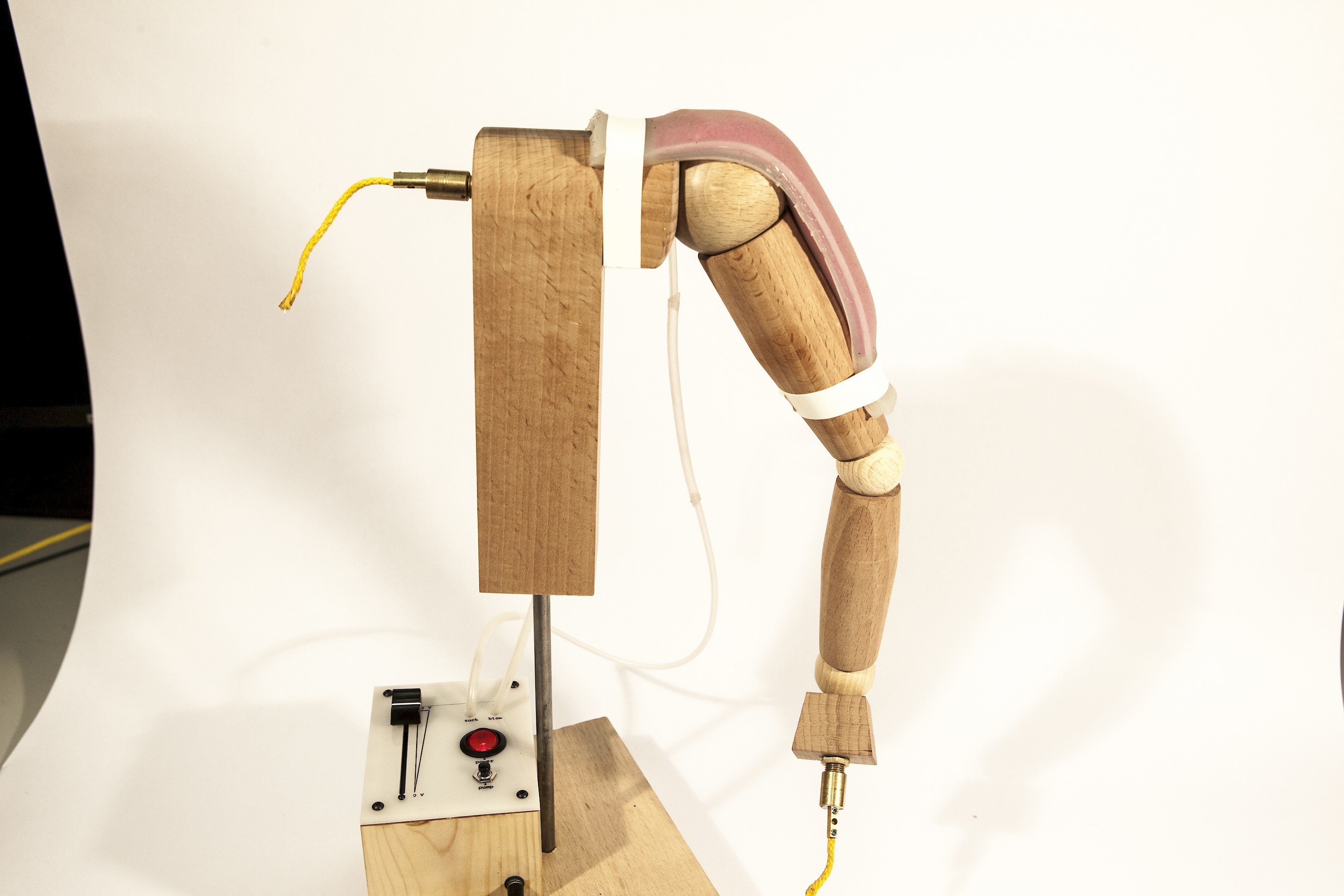
This project proposes soft actuators for supporting shoulder rehabilitation after surgeries on the deltoid muscle, and more broadly on regaining motor function of the upper arm. The proposed approaches are composed out of inflatable and deflatable, bendable, stretchable layerings and tubings which where tested on a 1:2.5 model. The advantages compared to known mechanical exoskeletons are adaptabil- ity to the individual anatomy of the upper body through flexible and soft constructions. The design of the working principles and performance of the soft actuators are also analogous to natural contractions and expansions of muscles, offering a synergy between the patients working muscles and the supporting orthotic.
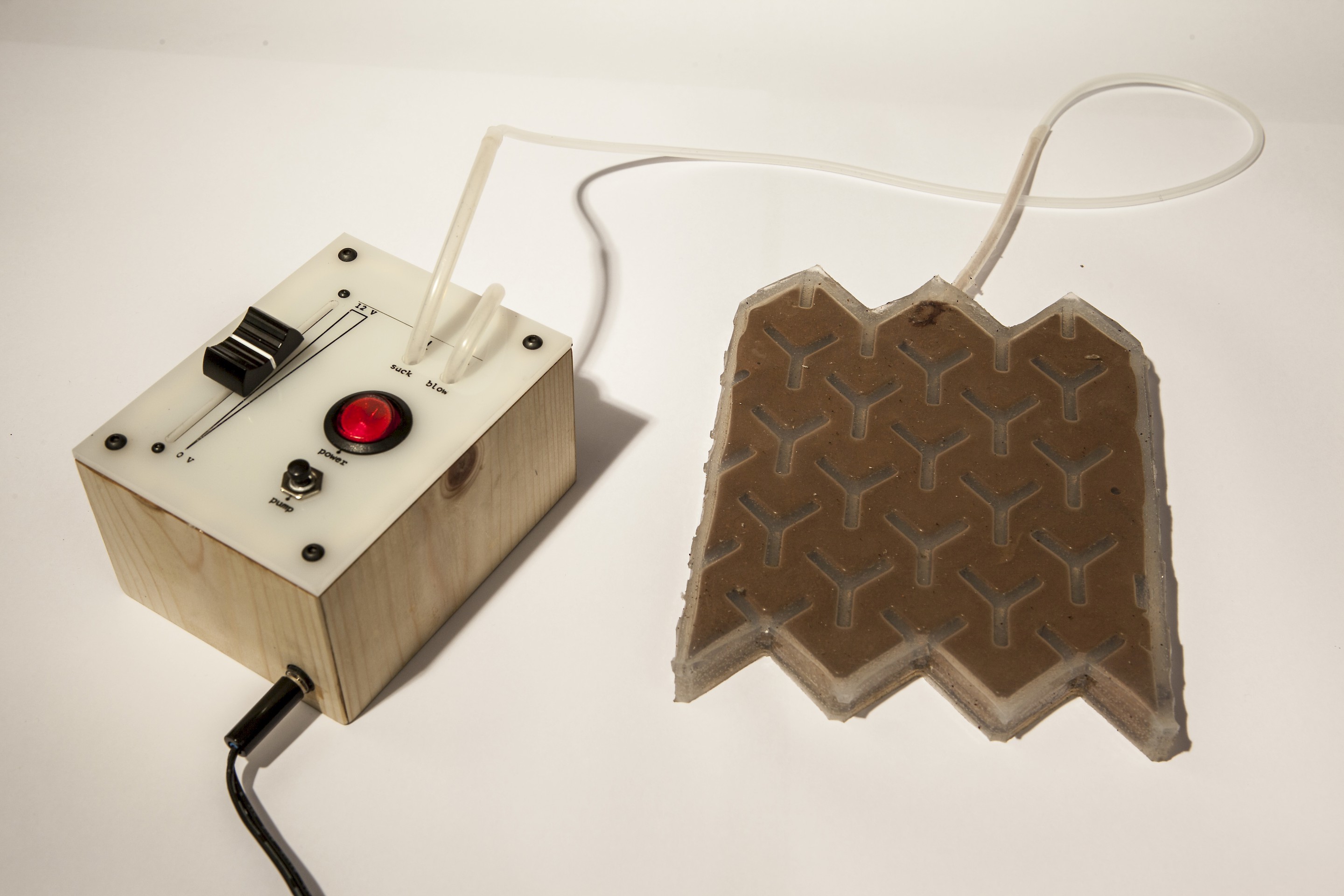
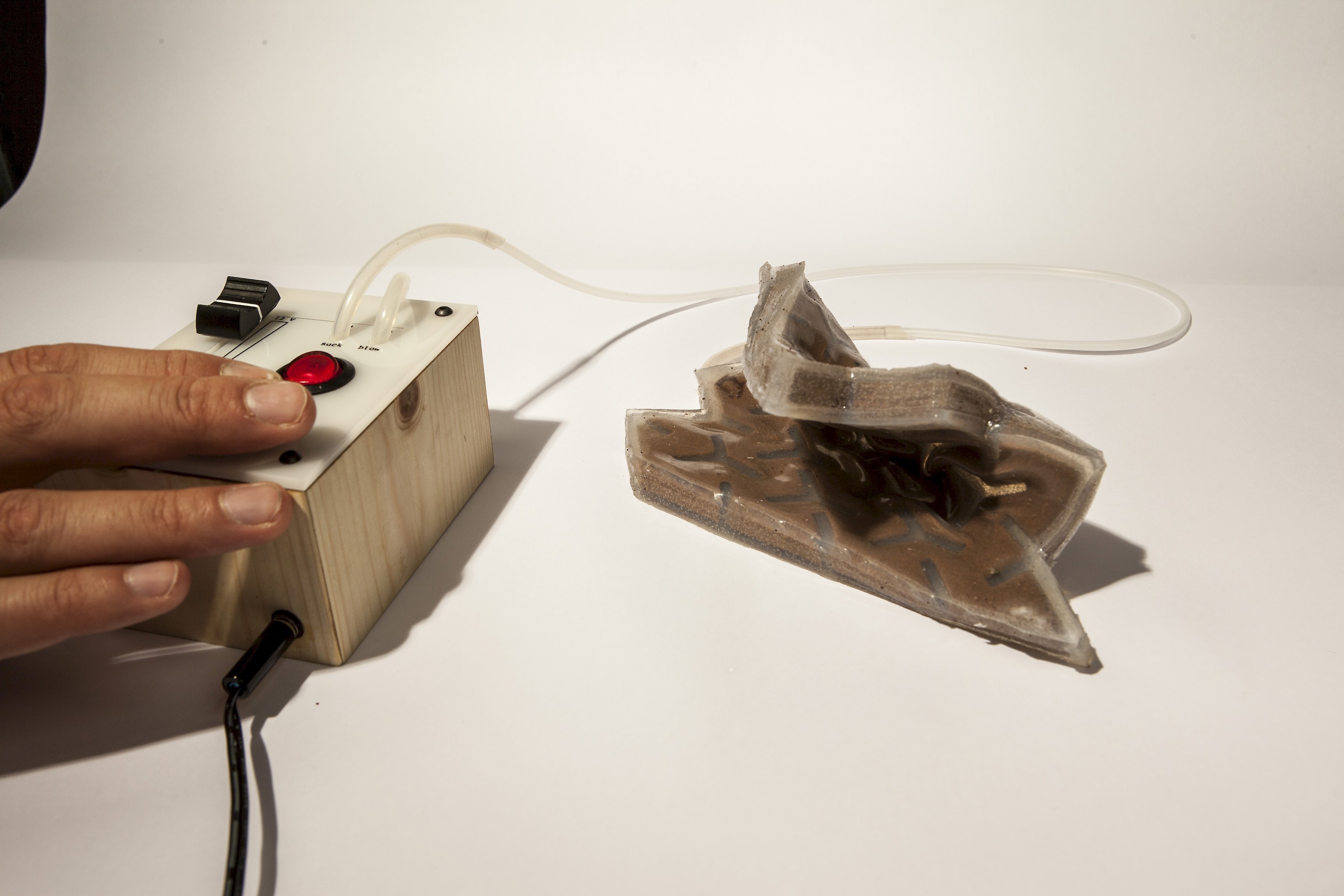
Through experimental evaluation and physical simulations of a real arm movement, we demonstrat two soft actuation systems successfully supporting and moving the arm. Nevertheless this is a project on a design and process-oriented level, for finding strategies and methods to support mechanical engineering efforts in this field. By referring to a set of different materials and their performance together with reflec- tive prototyping to we have attempted to find alternatives to more stereotypical electromechanical solutions.
Project lead: Luke Franzke
Researchers: Clemens Winkler and Verena Ziegler
Funding: ZHAW Mechanical department